经典网络结构 Faster R-CNN
在Object detection里,faster rcnn可以说是两步检测方法中被普遍使用的了。
下面以vgg16为base network的结构来介绍一下。
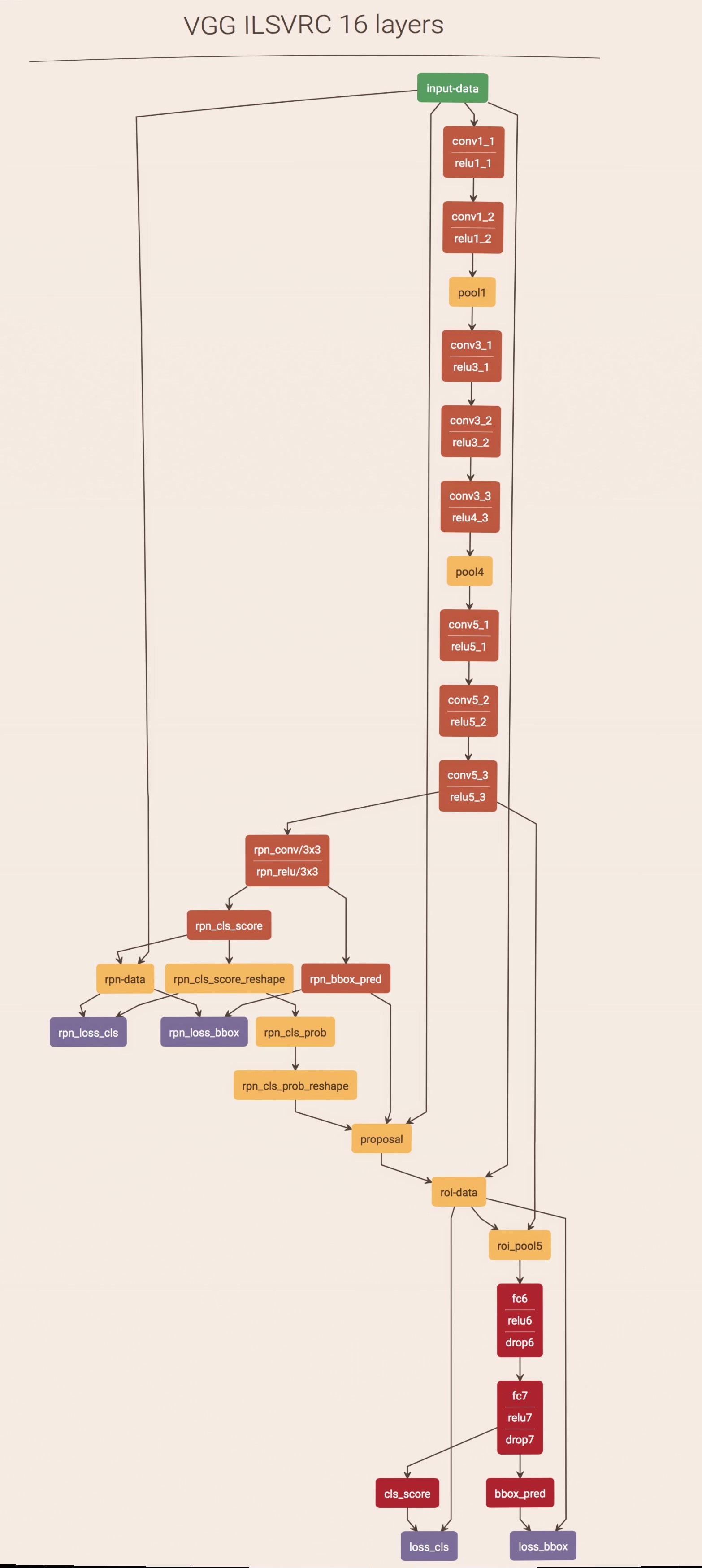
可以参考知乎上的这篇文章和[这篇文章](https://zhuanlan.zhihu.com/p/29400164)。
下图来源于上面的文章。
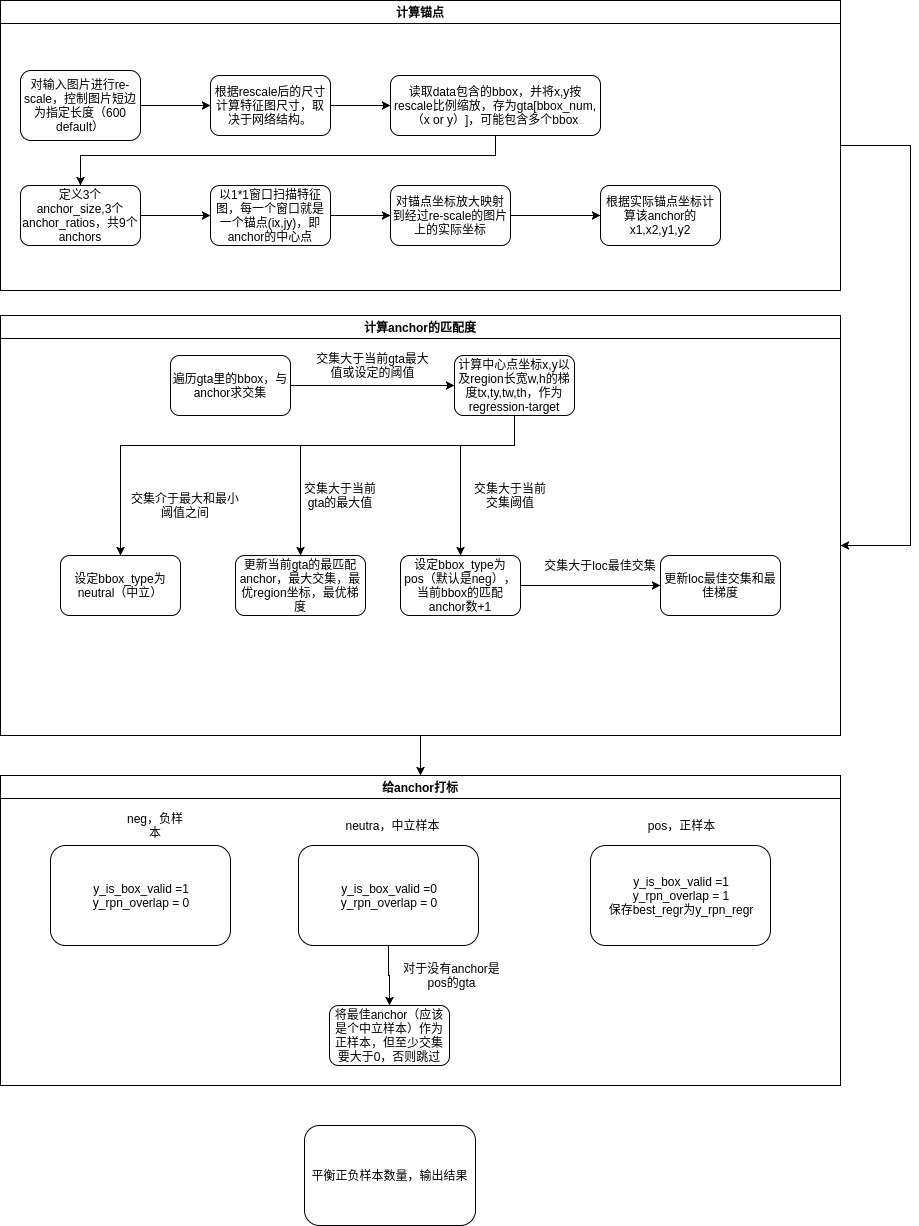
def calc_rpn(C, img_data, width, height, resized_width, resized_height, img_length_calc_function):
downscale = float(C.rpn_stride)
anchor_sizes = C.anchor_box_scales
anchor_ratios = C.anchor_box_ratios
num_anchors = len(anchor_sizes) * len(anchor_ratios)
# calculate the output map size based on the network architecture
(output_width, output_height) = img_length_calc_function(resized_width, resized_height)
n_anchratios = len(anchor_ratios)
# initialise empty output objectives
y_rpn_overlap = np.zeros((output_height, output_width, num_anchors))
y_is_box_valid = np.zeros((output_height, output_width, num_anchors))
y_rpn_regr = np.zeros((output_height, output_width, num_anchors * 4))
num_bboxes = len(img_data['bboxes'])
num_anchors_for_bbox = np.zeros(num_bboxes).astype(int)
best_anchor_for_bbox = -1*np.ones((num_bboxes, 4)).astype(int)
best_iou_for_bbox = np.zeros(num_bboxes).astype(np.float32)
best_x_for_bbox = np.zeros((num_bboxes, 4)).astype(int)
best_dx_for_bbox = np.zeros((num_bboxes, 4)).astype(np.float32)
# get the GT box coordinates, and resize to account for image resizing
gta = np.zeros((num_bboxes, 4))
for bbox_num, bbox in enumerate(img_data['bboxes']):
# get the GT box coordinates, and resize to account for image resizing
gta[bbox_num, 0] = bbox['x1'] * (resized_width / float(width))
gta[bbox_num, 1] = bbox['x2'] * (resized_width / float(width))
gta[bbox_num, 2] = bbox['y1'] * (resized_height / float(height))
gta[bbox_num, 3] = bbox['y2'] * (resized_height / float(height))